

Seamless Engineering 2025: Studierende zeigen ihr Können in Robotik und Materialflusstechnik



Auch 2025 bot die Lehrveranstaltung Seamless Engineering den Studierenden des Masterstudiengangs MIT erneut die Möglichkeit, praxisnahe Kenntnisse in der Robotik-Hardware (Greifroboter, AGVs) sowie in den zugehörigen Softwaretools (Robot Operating System) zu erwerben.
Im theoretischen Teil der Vorlesung wurden die Studierenden an einen systemorientierten und übergeordneten Ansatz zur Beschreibung, Bewertung und Entwicklung mechatronischer Systeme herangeführt. Ein besonderer Schwerpunkt lag dabei auf der Beschreibung von Intralogistiksystemen mit modularer Materialflusstechnik.
Im praktischen Teil konnten die Studierenden die erlernten Inhalte an industrienaher Hardware anwenden und vertiefen. Sie erlernten die systematische Entwicklung in einer Simulationsumgebung und den Übergang von der Simulation zur realen Hardware in kleinen Teams.
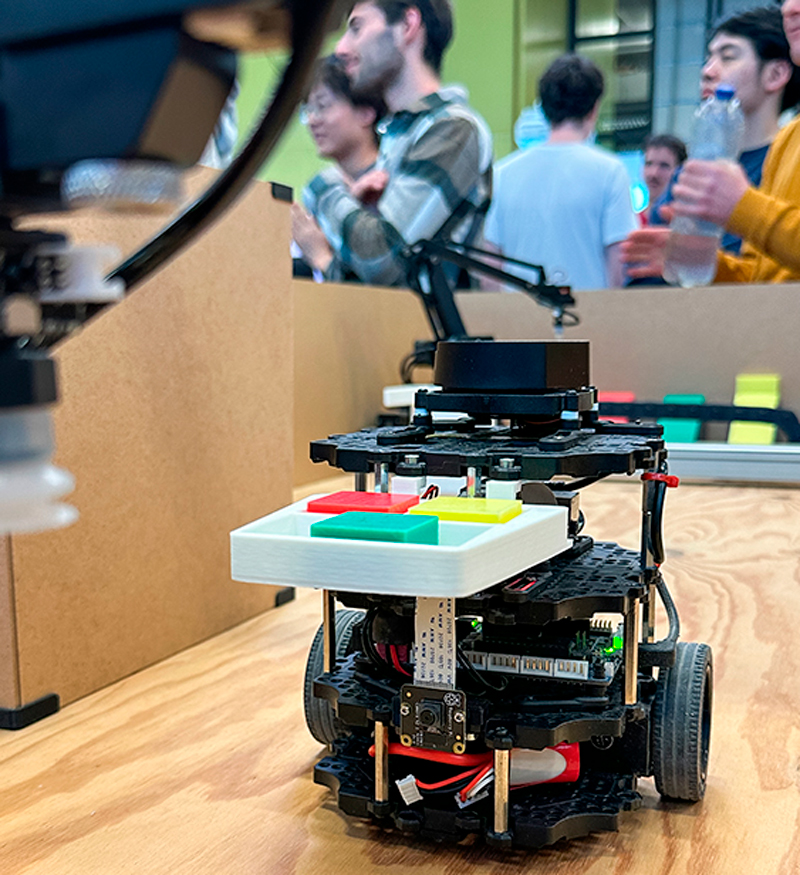
Ein besonderes Highlight war die abschließende Präsentation der Gruppenergebnisse am vergangenen Dienstag auf der Testfläche des IFL - Institut für Fördertechnik und Logistiksysteme, KIT. Die Aufgabe bestand darin, einen fiktiven Kundenauftrag zu erfüllen, bei dem verschiedene Bausteine im entwickelten Materialflusssystem aufgenommen und zu einer Lagerbox am Ende des Materialflusses transportiert werden mussten, die den fiktiven Kunden repräsentierte. Diese Aufgabe wurde von allen Beteiligten erfolgreich gelöst.
Das Team von Prof. Eric Sax wird auch im nächsten Jahr zusammen mit dem Team von Prof. Kai Furmans (IFL) die Koordination des Lehrmoduls übernehmen.